


















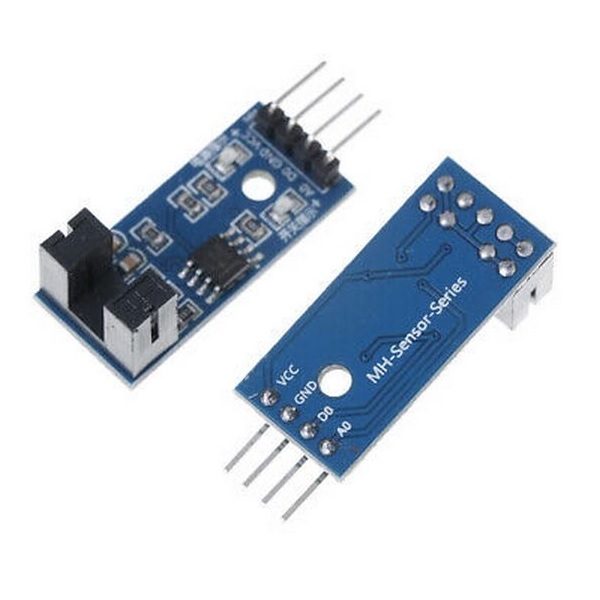
Capteur de vitesse LM393-H2010 pour Arduino
Survolez l'image pour l'agrandir
10.000 TND
Capteur de vitesse LM393 sert à mesurer la vitesse des moteurs. Il fonctionne sur le principe de la détection des changements de lumière (interruptions) passant par un capteur, ce qui correspond à la rotation d’un arbre moteur ou de toute pièce en mouvement.
Le module inclut typiquement une diode électroluminescente infrarouge et un phototransistor pour détecter la présence ou l’absence d’un objet, traduisant cela en signaux numériques. Ces signaux peuvent ensuite être utilisés pour des applications telles que la détection de vitesse de moteur, le comptage d’impulsions et la définition de limites de position.




